
地磅角差如何调整
时间:2018-12-06 阅读:2175
偏载是地磅重要的计量性能之一,角差调整是偏载调试的重要工作,
本文就模拟和数字传感器如何调整角差做点说明。
1. 引言
地磅,所用传感器的信号有模拟和数 字两种,数字传感器以其*的性能在新建地磅的占比越来越大,而原有模拟传感器地磅也在继续工作着。在检定与日常维护工作 中,如何检查并调整角差,是我们的一项重要工 作。
2.何为角差
角差是一种俗称。角,对应于各传感器所在 位置,如一台汽车衡有8个传感器,我们就说有 八个角。
八个角上按1/7量程做偏载测试,设测得大 值为小值为I腿,检定分度值为e,若 Imx- I腿>e,就说有角差。就要进行角差调整,调成 没有角差。
要调整角差,模拟传感器与数字传感器方法 不同,说说这两种传感器。
顾名思义,模拟传感器输出的是模拟信号 (Analog signa),数字传感器输出的是数字信号 Digital signa)。模拟信号其实就是电压信号,通 过A/D转换模块的转换数字信号就出来了。这个 转换模块包含了放大电路、CPU处理器等功能模 块,与模拟传感器一起集成了数字传感器。
模拟传感器接到模拟接线盒,数字传感器的 信号通过RS485接口输出到数字接线盒。
角差调整放置载荷方式有滚码推动、吊车吊 放、叉车行走等,各有优缺点。
滚码,成本低,费人力,遇有螺丝突出或秤 台变形推动困难。
吊车吊放,效率低,但每次都取出载荷回零, 各角间影响小。现在吊车吊臂采用机械手,吊放 载荷用钢丝绳方便快捷多了,是一种较好的方式。
叉车连同砝码,能使试验载荷更接近1/ N-D量程N为传感器个数,行走方式,效率 比其他都高,方便反复调整,但调整过程中叉车 都在秤台上,且车本身在震动,对信号稳定有影 响,各角间也有影响。
3.模拟传感器的角差调整
3.1微调
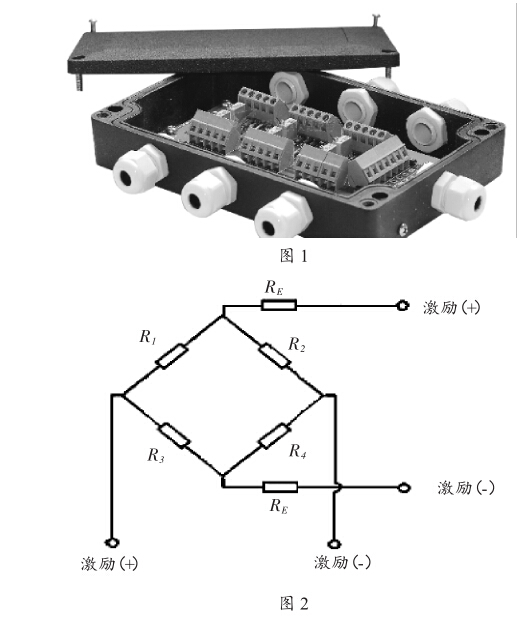
我们这里说的调整都是微调,外部因素如传 感器移位、没压实、秤体变形厉害导致大误差如 超出8d者,不属于角差调整范围。要先消除这些外部因素,再来进行角差调整。这些调整都是在 接线盒里进行的。接线盒之一如图1所示,通过 调整电位器实现微调。传感器接线图如图2所示。 这里分为调激励、调信号两种。
3.2激励调整
图2为四线制模拟传感器接线图,在传感器 接线盒里对应有两个多圈电位器,串联在传感器 激励电源回路,通过调整电位器的阻值调整激励 电压,调整传感器的灵敏度。有的接线盒只用一 个电位器分压,更为简洁。这种方式调整范围约 为8d, d为实际分度值。
3.3信号调整
将电位器并联在传感器信号端,调整电位器 就能调整传感器的输出电阻,从而调整传感器的 灵敏度。这种方式调整范围约为3d,比激励调整 窄,所以许多接线盒都采用调激励方式。但这种 方式适用于看着称重仪表来调,比较直观。
3.4调整方法
若8个角中只有一两个角与其他角不同,可 直接调整相应的电位器。
对于激励调整,一般情况是,若示值偏大, 则要顺时针调整电位器以增加电阻,分去多点电压,降低激励电压。反之则逆时针调整电位器。
对于信号调整,一般情况是,若示值偏大, 则要逆时针调整电位器以增加输出电阻,降低输 出电压,反之则顺时针调整电位器。
若8个角示值各不相同,也就是说比较乱, 则取m /2,调整各角电位器,使其示值为 平均值。
不管哪种方法,若电位器调到极限了都还没 达到要求,则需要反向调整其他角的电位器。
若已*调乱,则需将接线板拆下,将每个 电位器的阻值调成一样,且在整个可调阻值的中 间部位,再装回接线板接好传感器重新调整。
4.数字传感器的角差调整
相比于模拟传感器,数字传感器的角差调整 就方便多了,不用弯腰打开盖板在接线盒中调来 调去,直接在称重仪表上完成。
数字传感器角差的调整有自动和手动两种方 式,正常情况下,都会选择自动方式。以D2008 仪表用叉车行走方式为例来分别进行说明。
4.1 自动方式
确认秤体已被压实和调平后,进入自动角差 调整方式。具体如下:
0按“调角”若出现rr91”,则说明标 定开关没打开,可在背面按击触点标定开关。之 后再按“调角”出现-CODE?输入密码,出 厂缺省是六个8。
2按“输入”出现CtyO?后面的0表 示方式选择,0是自动方式。
3按“输入”出现oloAd”。此时确认秤 台无物,为空,且稳定灯亮。
(4按“输入”出现“---”,稳定后出现 Cr - ?此时将叉车开到1号角上,出现Cr 01?确认稳定灯。
(按“输入”显示ASS?,说明1号传 感器数据记录成功,接着显示Cr 01”。此时将 叉车开到下一角如2或3角,显示Cr 02”或 Cr 03”。
重复?过程,直至所有角记录完成,出现 nd?本次角差调整完成,自动退到称重状态。
另外许多仪表,在e过程中不显示ASS”, 而显示内码值如“78562”且在跳动中,等稳定 后按“输入”记录该传感器数据。数据跳动幅度只在各位数可视为稳定,若十位数跳动幅度大, 说明很难稳定,则需要将叉车熄火,以求稳定。
仪表显示的字母有大小写不同,应该是数码 管显示方便所需。
4.2手动方式
自动调角完成后,要再走一遍,一般各角都 会平衡的。若还有个别与其他角有差别如一个分 度值或半个分度值,可进行手动微调。
手动又分为调重量和调系数两种。
(1)调重量
将叉车开到需要调整的角上如5角,在上面 2过程中,输入??,选择重量调角方式,显 示Ctyl?。按“输入”,出现dj05?。按“输 入”,出现?--”,稳定后出现10010”,表示 当前显示重量为10010kg,改成跟他角的数据为 10020kg,按“输入?,出现ASS”自动返回称 重界面。本次手动微调完成。
(2)调系数
将叉车开到需要调整的角上如5角,在上面 (2)过程中,输入??,选择系数调角方式,显示 Cty2?。按“输入”,出现 Adj**”。输入 05, 显示 “SAdj05?,按“输入”,出现 “ 1.00000”, 表示当前角差系数为1.00000,修改为100120,按入”。若不用改其他角的系数直接按“称重” 退出到称重界面。本次手动系数微调完成。此时若看到重量仍然不对,可再次调整系数。
—般情况下,角差系数都是1.00000,角差系 数调整范围在0.5和1.5之间,若系数偏离 1.00000太多,则要检查秤的安装情况了。
5.结束语
地磅的角差调整方式多样,采取何种, 因器制宜,因人而异。模拟传感器调角时有按经 验确定调节电位器圈数的,也有用万用表量电压 或电阻来调节的。数字传感器调角比模拟的方便 多了,选择自动还是手动,看调之前走的各角数 据,若许多不同,选自动,若一两个不同,选手 动且以调重量优先。熟能生巧,不清楚时问标定 说明书。